
2022 FRC Robot
Robot Quick Facts
-
Name: Smay
-
Weight: 125lbs
-
Size: 30" L x 30" W x 36" H
-
Robot Capability:
1. 6 wheel customized tank drive
2. Deployable cargo ground intake
3. Cargo funneling hopper & indexer
4. Cargo shooter with 270 deg turret that shoots cargos
5. Extendable lead screw climber
Click for Robot Reveal

Engineering Objective Quick Facts
-
Gamepiece 1: Cargo | Scoring area: Hub Zone (Shooting)
-
End Game Climb: Hang Climb



CAD Overview:
Cargo
Ground
Intake
Chassis
Lead
Screw
Climb
Hopper
&
Indexer

Shooter
with
Turret
Module Breakdown:
Tank Drivebase
Drivebase allows robot to maneuver around the field quickly and precisely. Tank was chosen for its simple design with sufficient torque and traction.
West Coast Drive Tank Gearbox
-
high drive reduction (9 : 1) [16ft/s] with 5" black nitrile treaded billet wheels and 5" omni wheels on 4 corners
-
6 Falcon 500 motor for propulsion
-
All power transmission housed in a 3" by 2" aluminum tube
Chassis
-
30" by 30" frame
-
1/8" bellypan agressively pocketed
Electronics
-
Battery offset to one side for balancing CG
-
RoboRio & Sparkmax controllers on bellypan



Shooter
The Shooter launches the cargo from any angle and any range within the field limits. This allows for swift scoring into the hub zone.
Flywheel
-
2 Falcon 500 motors drives 1:1.5 gearbox that drives HTD pulleys
-
4" OD 60A Neoprene Fairlane Flywheel
-
Flywheel driven at up to 5000 RPM
Turret
-
Moves 270 deg range of motion within 1 second
-
Shooter sits on a 13" OD bearing with a 20DP gear ring
-
Turret driven by a pinion gear with a 45:1 gear reduction
Hood
-
Pivots around the flywheel shaft
-
Rollers on the hood provides front spin to the cargo
Intake
The cargo ground intake, rotationally deployed by piston, features 2 sets of rollers that intakes cargos from the ground.
Intake Rollers
-
Neo 550 motor drives the 2 sets of rollers with a 3:1 reduction with HTD pulleys
-
3" OD wheels place on the rollers for greater linear speed, 5" star wheels placed on the first sets of contact rollers for better ground cargo control
Intake Deployment
-
Clevis pin-bushing pin joints for free rotation
-
Rotation motion powered and limited by 2 pistons

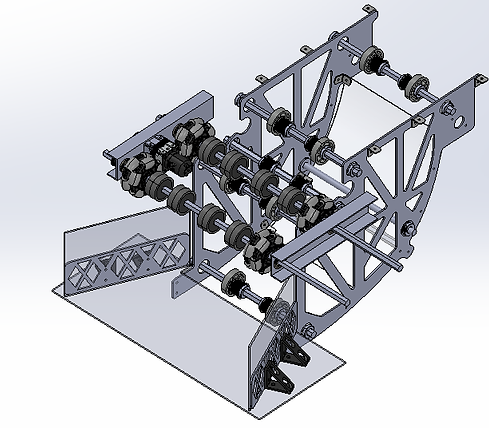
Hopper & Indexer
The hopper and indexer assembly provides a straight tunnel connection that connects the wide output of the intake into the singular input of the shooter. It funnels and transfers the cargos within the robot perimeter so that both the intake and shooter can function effectively.
Hopper
-
Dead plate funnel
-
Powered roller roof with 2 sets of 2" rollers and 3" omni wheels on the sides to assist with funneling
-
Rollers are powered by neo 550 motor on a 3:1 gearbox reduction connected via HTD pulleys
Indexer
-
Transfer cargo thru a arc path up and feeds it into the shooter
-
Powered by the same motor as the hopper and connected via a long HTD belt that acts like a conveyor

Climb
This lead screw climb pivots back and forth to climb the monkey bars. The linearly actuated device hook onto a bar, pulls the robot up with a lead screw until the anchor hooks onto the same bar as well. The lead screw columns then releases the current bar, pivot forward and reach for the next bar, which allows the robot to climb a multi-step monkey bar structure.
Structure
-
The pivot of the lead screw device is attached firmly to the robot truss, the motion is limited with cable wires
-
Lead screw device is house in a 2" square aluminum tube with an inner stage that has a hook at the top
-
Anchor design consists of spring loaded one-way gate that snaps onto a bar when robot reaches a certain height
Gearbox
-
2 NEO motors direct drives the lead screws with a 45:1 reduction with no back drive