
2024 FRC Robot
Robot Quick Facts
-
Name: Cartman
-
Weight: 125lbs
-
Size: 32" L x 27" W x 27" H
-
Robot Capability:
1. 4 wheel SDS MK4i Swerve Module
2. Under-the-bumper ground intake for notes
3. Gear rack powered hood that provides angle adjustments to the shooter and stinger
3. 2 stages belt driven stinger
4. Grabber that scores note in amp station
5. Double vertical flywheel shooter that scores note in speaker station
6. Winch style linear climb that hook onto and pulls onto the chain, and in addition, scores into the trap

Click for Robot Reveal
Engineering Objective Quick Facts
-
Gamepiece: Note | Scoring area 1: Speaker Station (Shooting)
-
Scoring area 2: Amp Station (Pick & Place)
-
End Game Climb: Hang Climb | Scoring Area 3: Trap (Climb + Pick & Place)




CAD Overview:
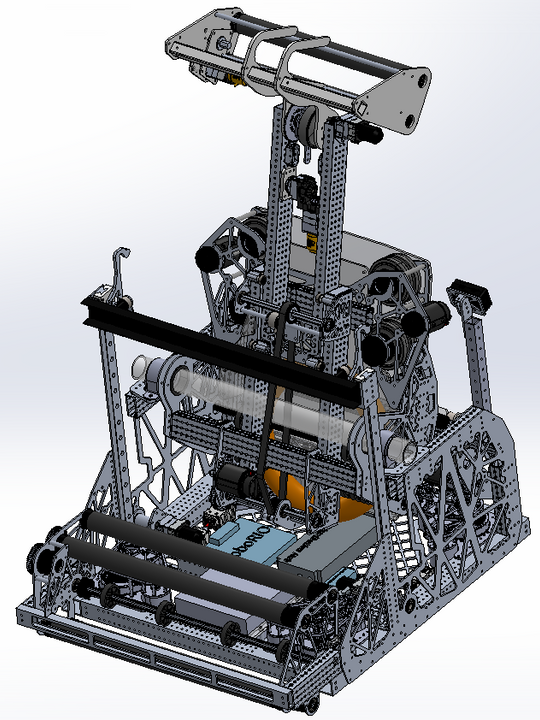
Winch
Style
Linear
Climb
Chassis
Stinger

Amp
Wrist
Amp
Grabber
Vertical
Flywheel
Shooter
Note
Ground
Intake
Shooter
Hood/
Angle
Pivot
Module Breakdown:
Swerve Drivebase
Drivebase allows robot to maneuver around the field quickly and precisely. Swerve was chosen for its increased mobility and ability to avoid defense.
SDS MK4i Modules
-
L2 drive reduction (6.75 : 1) [15ft/s] with 4" black nitrile treaded billet wheels
-
Falcon 500 motor for drive and NEO motor for steering
Chassis
-
27" by 32" frame
-
1/8" bellypan agressively pocketed
Electronics
-
Battery laid down for lower CG and more space up top
-
RoboRio, PDP, & Swerve Sparkmax controllers on bellypan




Stinger
The stinger controls the vertical movement of the wrist and amp grabber. This allows for swift scoring at the amp and trap positions.
Elevator
-
1 Falcon 500 motor drives 3:1 set of 20DP gears
-
2 x 1 x 1/8" Uprights mounted to the angled pivot
Carriage
-
Moves full 13" range of motion within 0.2 seconds
-
Overextended for extra reach
-
Rectangular frame that allows housing of the grabber wrist
-
Igus Chain on side to enable smooth wire motion
Electronics
-
Two physical limit switches for elevator range of motion
-
Motor encoder

Amp Grabber Wrist
The grabber wrist, linearly raised by the stinger, features gearbox for the wrist and pivot structure that the end effectors are mounted from. A large diameter turntable utilized provides strong attachment for a cantilevered application and prevents deformation.
Wrist Gearbox
-
Neo 550 motor drives a 108:1 gearbox that drives a 54T #25 Sprocket that is bolted to the turntable motion
-
Bevel gears are used between the gearbox and sprocket to package and integrate the wrist structure better into the narrow carriage
-
Plate and standoff structure that is mounted to the elevator carriage



Shooter with adjustable hood
The note shooter with angle adjustment hood has 8 4" diameter flywheels for shooting the note at a high speed out from the chamber, combined with a roller of 2" diameter wheels that intakes the note from the intake mechanism and an angle adjustment shooter hood, enables the holding and launching of the note from a varying distance from the speaker goal.
-
8 4" diameter Colson wheels 1" tall powered by 2 Kraken X60 motors for high linear speed when shooting notes
-
Several sets of 2" flex rollers for transfer notes from the intake powered by Neo 550 motor with a 9:1 reductions via HTD 5M 9mm pulleys and bevel gears
-
Wet-sanded PC sheets contacts the note with minimal friction
-
2" diamter PC tube act as light weight yet strong pivot housed to the truss with two routing clamps
-
9" radius gear racks mounted on the shooter assembly, powered by a Falcon 500 motor with a gearbox reduction of 81:1 via a 20DP pinion spur gear
-
Limelight Vision Camera mounted at a vantage point that provides accurate aiming for the shooter
Amp Grabber
The amp roller grabber has rollers for note intaking and outaking, which enables the acquisition and ejecting for notes at different angles.
-
1.625" double horizontal rollers with a PC tube and a silicone sleeve
-
NEO 550 motor with a 3:1 reduction powers rollers via HTD 5M 9mm pulleys and 20DP spur gears
-
Grabber mounted on a free rotating wrist with hardstops for varying degrees
-
3/16" PC side plates houses the roller and gearbox geometry
-
3/16" PC mounting plates connects grabber to the wrist as well as a hooked shaped contour that serves as a hard stop for the note
-
limit switch triggers when note acquired


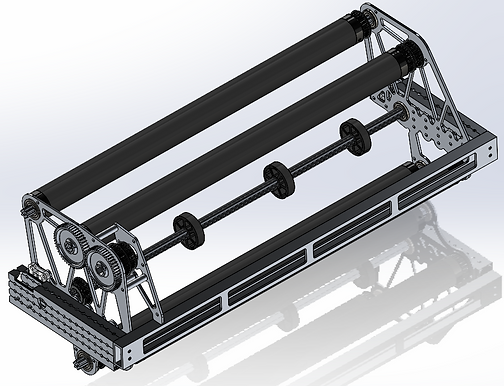
Ground Intake
This under-the-bumper style note ground intake has 5 sets of rollers for rapid note intaking, which enables the acquisition for notes immediately upon contact.
-
5 sets of 1.625" horizontal rollers with a PC tube and a silicone sleeve
-
NEO 550 motor with a 5:1 reduction powers rollers via HTD 5M 9mm pulleys and 20DP spur gears
-
Mount as a part of the chassis perimeter
-
1/8" Al side plates houses the roller and gearbox geometry

Climb
This linear winch climb pops the hooks up to deploy. A constant force spring pulls the hooks up as the winch releases along a trapizoidal shaped linear rail. The robot with deployed climbing mechanism will drive into the chain, hooks lock onto the chain as the winch retracts the hook all the way down to the base of the robot, pulling the robot high up in the air. Additionally, with the combination of the climbing mechanism and the stinger and grabber, the robot is able to score into the trap when it climbs all the way up the chain.
Structure
-
The linear rails are held to the chassis by two sideplates that are part of the robot truss structure
-
C channel connects the top of the linear rails, acting as a crossbar
-
Plate-standoff structure utilized for both the winch mounting, integrated into the chassis tube
-
Hooks are mounted to UHMW plastic carriages
-
Entire mechanism mount directly to the robot chassis
Gearbox
-
2 Neo 550 powers 81:1 Gearbox that outputs to 1" OD drum to pull flexible cable wire and move 24" in 2s