
2023 FRC Robot
Robot Quick Facts
-
Name: Thomad the Swerve Engine
-
Weight: 125lbs
-
Size: 30" L x 30" W x 54" H
-
Robot Capability:
1. 4 wheel SDS MK4i Swerve Module
2. Ground Intake for cubes & cones
3. rack and pinion style pivot arm
4. End effector that holds and scores cones and cubes
5. Landing Gear Style Lead Screw Climb
Click for Robot Reveal

Engineering Objective Quick Facts
-
Gamepiece 1: Coral | Scoring area: Grid cone nodes (Pick & Place)
-
Gamepiece 2: | Scoring area: Grid cube nodes (Pick & Place)
-
End Game Climb: Platform Balance Climb




CAD Overview:
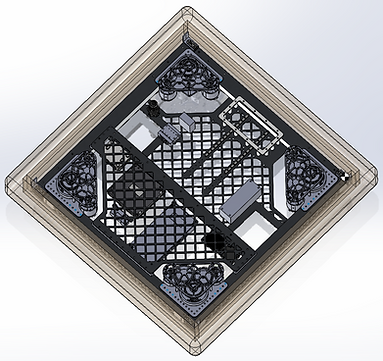
Chassis

Pivot
Arm
Ground
Intake
Grabber

Landing Gear
Style
Lead Screw
Climb
Module Breakdown:
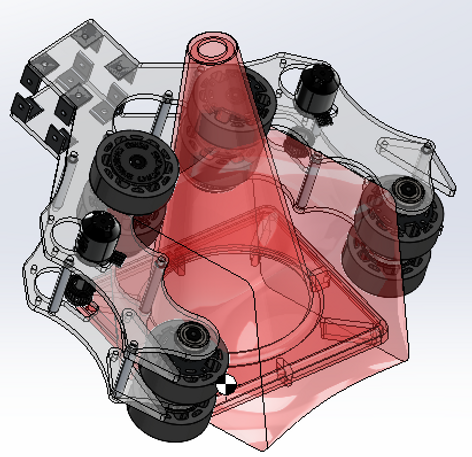
Swerve Drivebase
Drivebase allows robot to maneuver around the field quickly and precisely. Swerve was chosen for its increased mobility and ability to avoid defense.
SDS MK4i Modules
-
L2 drive reduction (6.75 : 1) [17ft/s] with 4" black nitrile treaded billet wheels
-
Falcon 500 motor for drive and NEO motor for steering
Chassis
-
30" by 30" frame
-
1/8" bellypan agressively pocketed
Electronics
-
Battery offset to one side for balancing CG
-
RoboRio & Swerve Sparkmax controllers on bellypan

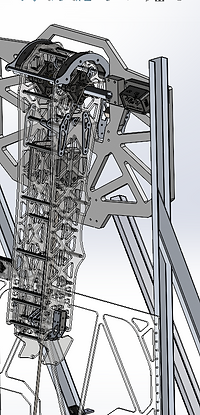


Pivot Arm
The pivot arm controls the angular movement of the grabber for both gamepieces with a piston extension. This allows for access at all levels of the Grid.
Arc gearbox
-
Neo 550 motor drives 45:1 gearbox that drives 36T #25 Sprocket
-
Arc shaped "rack" with metal plate in the middle and PC plate on the side serving as guard rail
-
#25 chain bolted on the the side of the metal arc and meshes with the pinion side
-
6 10lbs constant force spring loaded near the arm pivot serving as counter balance
Arm Structure
-
Moves full 80 deg range of motion within 1.2 seconds
-
Two big PC side plates with standoffs to withstand impact while maintaining some rigidity
-
Inner stage housed inside activated by piston for extra extension during scoring
-
Igus Chain routed in the arm to enable smooth wire motion
Electronics
-
One physical limit switch for arm pivot range of motion
-
Motor encoder
Ground Intake
The ground intake, mounted to the chassis directly and rotate out to deploy, features a roller ground intake for both cone and cube. The two rollers either grabs onto the cone flange, flips the cone into the grabber with the pivot rotation or pass the cube through into the intake.
Pivot Rotation
-
2 neo 550 motors drives a 9:1 gearbox that direct drives shaft bolted to the turntable motion
-
Plate and standoff structure mounts to the chassis
Roller Intake
-
neo 550 motor powers to 2 2" roller with a 3:1 gear reduction via pulley and gear
-
PC Plate and standoff structure houses & protects the power transmission and adds rigidity

Grabber
The roller grabber has wheels for coral intaking and outaking, combined with the spring loaded mechanical align system, enables the acquisition and scoring for coral with a 60 degree window of error.
-
8 staggered 3" flex wheels 1" tall for intaking and gripping cone and cube
-
2 neo 550 motor with a 5:1 reduction powers wheels via HTD 5M 9mm pulleys
-
1/4" PC plate and standoff structure houses the power transmission and wheels
-
current control triggers when cone or cube acquired

Landing Gear Climb
This Landing Gear style lead screw climb actuate downwards onto the ground to deploy via lead screw. The robot with deployed climbing mechanism will drive onto the ramp with half the robot hanging off the edge to save space for two other robots on the platform.
Structure
-
Plate-standoff structure utilized for housing the lead screw deisgn
-
Entire mechanism mount directly to the robot chassis and truss via a Nylon block
-
Linear rail screwed onto the plastic block to help guide the lead screw actuation
Gearbox
-
neo 550 motor with 81:1 reduction powers the lead screw
-
NEO motor with 9:1 reduction powers the wheels on the landing gear