
2025 FRC Robot
Robot Quick Facts
-
Name: Mechanical Persuasion
-
Weight: 115lbs
-
Size: 32" L x 27" W x 42" H
-
Robot Capability:
1. 4 wheel SDS MK4i Swerve Module
2. Station funnel pickup for coral
3. 3 stages, cascade rigged, chain driven elevator
4. End effector with turntable wrist that holds and
scores coral and algae
5. Deployable intake-style winch and pivots cage to climb
Click for Robot Reveal

Engineering Objective Quick Facts


-
Gamepiece 1: Coral | Scoring area: Reef Zone (Pick & Place)
-
Gamepiece 2: | Scoring area: Barge (Pick & Place)
-
End Game Climb: Hang Climb



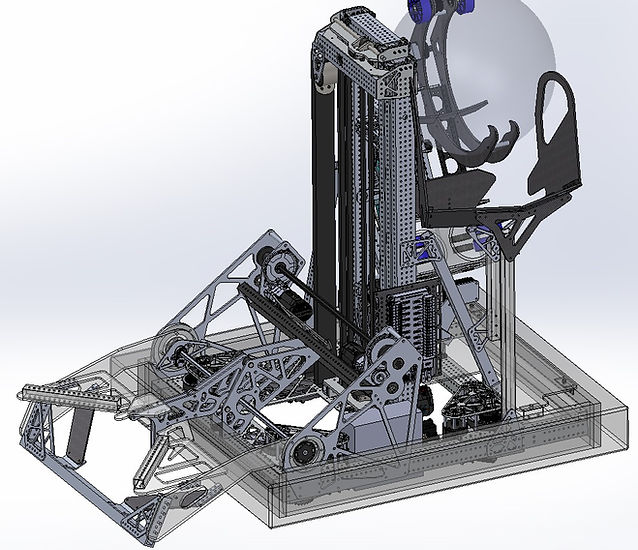
CAD Overview:
Coral
Intake
Funnel
Chassis

Elevator
TurntableWrist
Ball
Grabber
Coral
Grabber
Intake
Style
Winch
Climb
Module Breakdown:
Swerve Drivebase
Drivebase allows robot to maneuver around the field quickly and precisely. Swerve was chosen for its increased mobility and ability to avoid defense.
SDS MK4i Modules
-
L3+ drive reduction (5.36 : 1) [19ft/s] with 4" black nitrile treaded billet wheels
-
Kraken X60 motor for drive and NEO motor for steering
Chassis
-
27" by 32" frame
-
1/8" bellypan agressively pocketed
Electronics
-
Battery offset to one side for balancing CG
-
RoboRio & Swerve Sparkmax controllers on bellypan


Turntable Wrist
The turntable wrist, linearly raised by the elevator, features gearbox for the wrist and the turntable pivot structure that the end effectors are mounted from. A large diameter turntable utilized provides strong attachment for a cantilevered application and prevents deformation.
Wrist Gearbox
-
Kraken X60 motor drives a 108:1 gearbox that drives a 72T #25 Sprocket that is bolted to the turntable motion
-
Plate and standoff structure that is mounted to the elevator carriage
Turntable
-
10" diameter turntable bearing with integrated mounting holes
-
1" square tubes serves as connection between pivot joint and carriage to offset the rotation center for desired scoring configuration



Elevator
The Elevator controls the vertical movement of the turntable wrist and grabbers for both gamepieces. This allows for swift scoring at all levels of the Reef Zone.
Elevator
-
2 Kraken X60 motors drives 3:1 gearbox that drives 14T #35 Sprocket
-
2 x 1 x 1/8" Uprights supported by A-Frame and crossbars
Carriage
-
Moves full 60" range of motion within 0.4 seconds
-
Overextended for extra reach
-
Rectangular frame that allows mounting plates for turntable wrist to bolt on
-
Igus Chain on side to enable smooth wire motion
Electronics
-
Two hall effect magnetic limit sensors for elevator range of motion
-
Motor encoder

Coral Grabber
The coral roller grabber has wheels for coral intaking and outaking, combined with the spring loaded mechanical align system, enables the acquisition and scoring for coral with a 60 degree window of error.
-
3" flex wheels 1" tall for intaking slightly misaligned corals
-
2" flex wheels 1/2" tall for gripping corals
-
NEO Vortex motor with a 3:1 reduction powers wheels via HTD 5M 9mm pulleys and 20DP spur gears
-
Grabber mounted on a free rotating turntable with motion limiting plates with stiff springs loaded on both sides for mechanical compensation when misaligned
-
45 deg SRPP front shield to catch coral with slight rebound
-
Retroreflective sensor triggers when coral acquired
Algae Grabber
The algae roller grabber has wheels for algae intaking and outaking, combined a harpoon shaped contour, enables the acquisition, secure holding and scoring for algae.
-
3" flex wheels 1" tall for decent linear speed when intaking algae
-
Harpoon shaped tip on the contour to deform the ball when compressed for better grip and secure holding
-
Neo 550 motor with a 9:1 reduction powers wheels via HTD 5M 9mm pulleys
-
SRPP composite military grade material for extremely light weight yet decently stiff application



Climb
This intake style winch climb pivots downward to deploy. An anchor with one way locking mechanism triggers as the intake climb unwinded. The robot with deployed climbing mechanism will drive into the cage, anchor locks onto the bottom of the cage as the winch retracts the intake back up, pulling the robot off the ground.
Structure
-
Intake sideplates are 3/8" PC held together by 4" turntables as pivots, 1" square tubes with pocketed truss plate as crossbar
-
Plate-standoff structure utilized for both the winch mounting and anchor mounting
-
Anchor design consists of a clevis pin as pivot and a custom spring loaded latch as a one-way gate style locking mechanism
-
Entire mechanism mount directly to the robot chassis
Gearbox
-
2 Kraken X60 powers 62.5:1 Gearbox that outputs to 1" OD drum to pull dyneema and move 30" in 2s